Painter Robot
During my stay at the University of Trieste in Italy, I have worked on the painter robot project under the supervision of Dr. Gallina. In this project, I have developed a novel optimized non-photorealistic rendering method which is inspired by Painterly algorithm. Utilizing the new method minimizes brush strokes overlapping on the canvas and decreases the cost of operation time. Additionally, I have also developed a python interface which gets brush strokes as the input data and paints them on the canvas by controlling a UR10 arm robot using MoveIt and ROS.
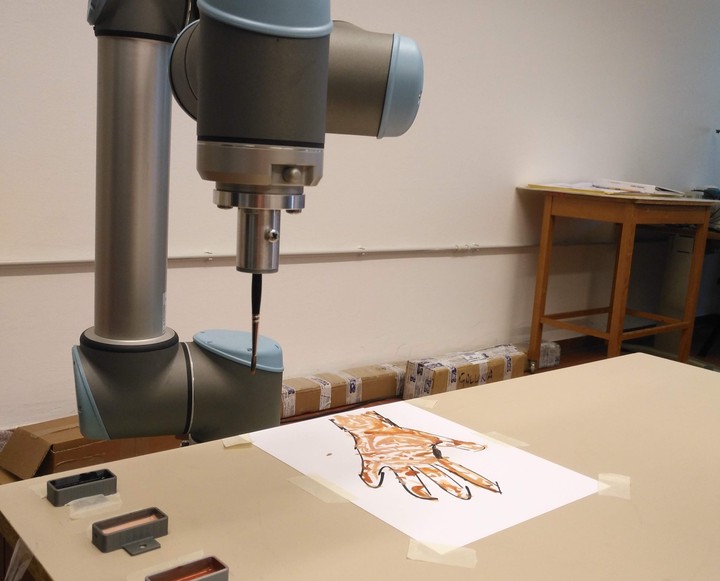
Video: A demo of the painter robot while painting a hand
