
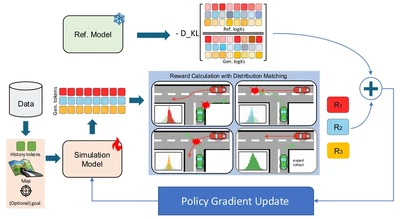
RLFTSim: Realistic and Controllable Multi-Agent Traffic Simulation
RL-based fine-tuning framework for multi-agent traffic simulation 2nd Place Waymo SimAgent Challenge 2025 Accepted at CVPR 2026
I am a Ph.D. student in Computing Science at the University of Alberta and a researcher at Noah’s Ark Lab, Huawei Technologies Canada. My research centers on behavior modeling in autonomous driving, with the goal of building traffic agents that simulate and predict real-world driving behavior. My recent work on RL-based fine-tuning for traffic simulation (RLFTSim) won 2nd place in the Waymo SimAgent Challenge 2025 and is accepted at CVPR 2026.
My research covers causal trajectory prediction and inter-agent interaction reasoning (CRiTIC, ICRA 2025), cooperative motion forecasting through vehicle-to-vehicle communication, and spatial reasoning with multimodal large language models (MLLMs). During my Master’s at the Sharif University of Technology, I was part of the CEDRA research group, where I developed a socially-aware SLAM algorithm and the ROS-based software framework for the Arash social robot — a companion robot for children with cancer. I also worked on robotic painting with the UR10 arm robot during a research visit at the University of Trieste.
Ph.D. in Computer Science (in-progress)
University of Alberta
M.Sc. in Mechanical Engineering
Sharif University of Technology
B.Sc. in Mechanical Engineering
University of Tehran
RL-based fine-tuning framework for multi-agent traffic simulation 2nd Place Waymo SimAgent Challenge 2025 Accepted at CVPR 2026
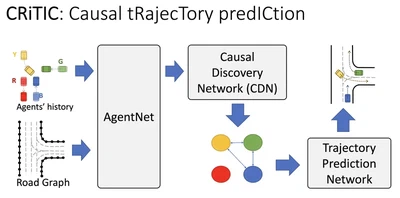
Causal attention gating for robust trajectory prediction Filters non-causal agent interactions in autonomous driving Accepted at ICRA 2025
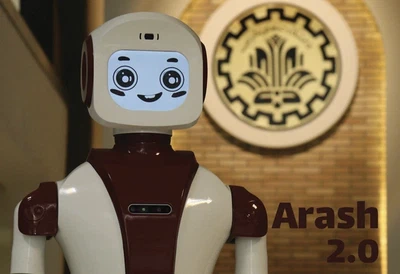
Social companion robot for children with cancer Socially-aware SLAM algorithm with pedestrian tracking ROS-based software framework CEDRA lab, Sharif University of Technology
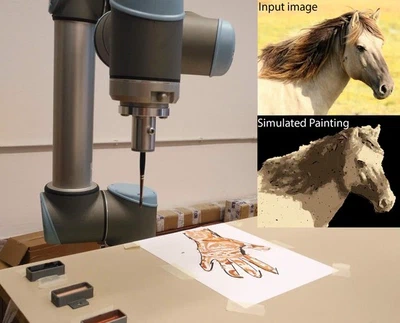
Non-photorealistic rendering for watercolor painting with UR10 arm robot Painting API using motion planning algorithms (ROS-based) University of Trieste, Italy