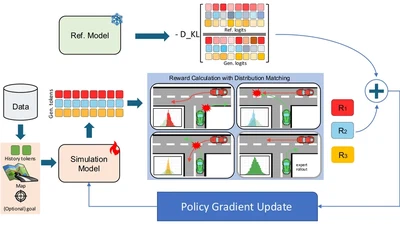
RLFTSim: Realistic and Controllable Multi-Agent Traffic Simulation
RL-based fine-tuning framework for multi-agent traffic simulation 2nd Place Waymo SimAgent Challenge 2025 Accepted at CVPR 2026
RL-based fine-tuning framework for multi-agent traffic simulation 2nd Place Waymo SimAgent Challenge 2025 Accepted at CVPR 2026
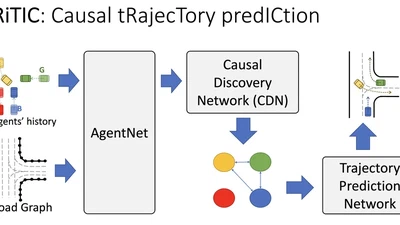
Causal attention gating for robust trajectory prediction Filters non-causal agent interactions in autonomous driving Accepted at ICRA 2025
Social companion robot for children with cancer Socially-aware SLAM algorithm with pedestrian tracking ROS-based software framework CEDRA lab, Sharif University of Technology

Non-photorealistic rendering for watercolor painting with UR10 arm robot Painting API using motion planning algorithms (ROS-based) University of Trieste, Italy